您好,歡迎訪問江蘇研茂包裝自動化有限公司!
- 網(wǎng)站地圖
- 聯(lián)系我們
- 關(guān)注微信
您好,歡迎訪問江蘇研茂包裝自動化有限公司!

全國免費咨詢熱線
4008501759
免費咨詢熱線
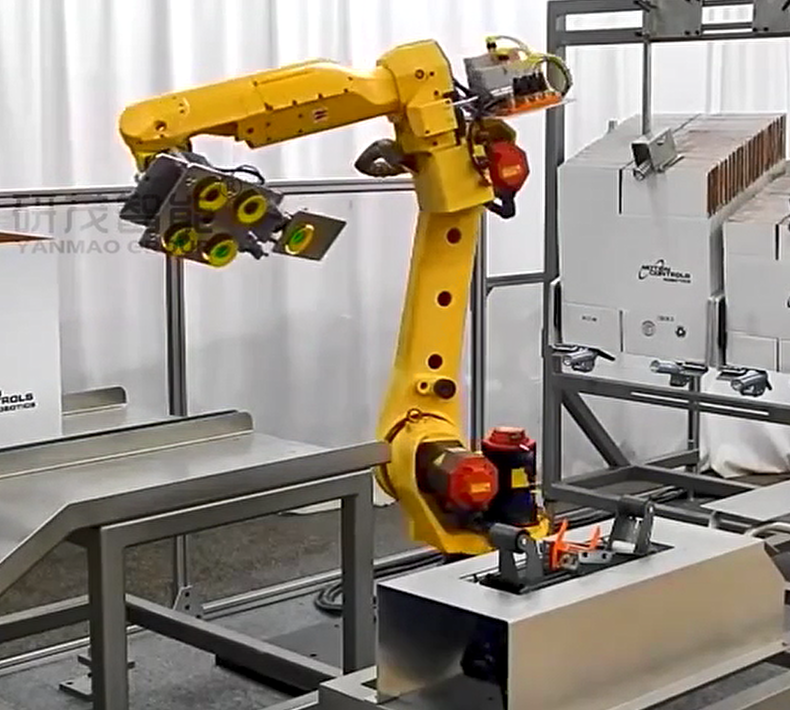
18016000798碼垛機器人是一種高效率、高精度的物流設(shè)備,廣泛應(yīng)用于各種物流行業(yè)中。作為一個碼垛機器人的使用者,了解其控制原理圖是非常必要的。本文將為大家講解碼垛機器人的控制原理圖,以及如何理解這些圖紙,從而更好地理解碼垛機器人的工作原理。
一、碼垛機器人的控制原理圖
碼垛機器人的控制原理圖主要分為硬件和軟件兩個部分。硬件部分主要包括機器人本體、控制器、傳感器、執(zhí)行器等;軟件部分主要包括控制程序、編程軟件等。
(一)硬件部分
1.機器人本體

機器人本體是碼垛機器人的核心部件,其主要由機械臂、電機、減速器、傳動機構(gòu)、傳感器等組成。機械臂是機器人的主要工作部件,通過電機驅(qū)動,完成碼垛作業(yè)。
2.控制器
控制器是碼垛機器人的大腦,主要負(fù)責(zé)機器人的控制和調(diào)度。控制器通常由控制主板、電源、輸入輸出接口、通訊接口等組成。
3.傳感器
傳感器是碼垛機器人的感知器官,主要用于感知周圍環(huán)境和物體信息。常用的傳感器包括激光傳感器、視覺傳感器、力傳感器等。
4.執(zhí)行器
執(zhí)行器是碼垛機器人的執(zhí)行部件,主要用于完成機器人的動作。常用的執(zhí)行器包括電機、氣缸、伺服機構(gòu)等。
(二)軟件部分
1.控制程序
控制程序是碼垛機器人的核心軟件,主要負(fù)責(zé)機器人的控制和調(diào)度。控制程序通常由多個模塊組成,包括運動控制模塊、傳感器控制模塊、通訊控制模塊等。
2.編程軟件
編程軟件是碼垛機器人的編程工具,主要用于編寫控制程序。常用的編程軟件包括RoboDK、ABB RobotStudio、KUKA Sim Pro等。
二、碼垛機器人的工作原理
了解了碼垛機器人的控制原理圖,我們來看看它的工作原理。
碼垛機器人的工作流程一般為:物料進入碼垛區(qū)域→機器人通過視覺或激光傳感器感知物料位置→機器人計算出最佳碼垛方案→機器人執(zhí)行碼垛動作→碼垛完成。
在這個過程中,機器人需要完成以下動作:
1.定位動作
機器人通過視覺或激光傳感器感知物料位置,并計算出物料的坐標(biāo)信息。
2.路徑規(guī)劃
機器人根據(jù)物料的坐標(biāo)信息,計算出最佳的碼垛路徑,并生成相應(yīng)的控制程序。
3.執(zhí)行動作
機器人根據(jù)控制程序,完成物料的碼垛動作。
4.安全控制
機器人在執(zhí)行動作過程中,需要進行安全控制,防止碰撞和意外傷害的發(fā)生。
三、如何理解控制原理圖
了解了碼垛機器人的控制原理圖和工作原理,我們再來看看如何理解這些圖紙。
(一)學(xué)習(xí)電氣基礎(chǔ)知識
控制原理圖是一種電氣圖紙,因此學(xué)習(xí)一些電氣基礎(chǔ)知識是非常必要的。比如,學(xué)習(xí)電路中的電阻、電容、電感等基本元件,以及電路中的串聯(lián)、并聯(lián)等基本電路知識。
(二)了解圖例和符號
控制原理圖中有很多圖例和符號,這些符號代表不同的元件和電路。因此,了解這些圖例和符號是非常必要的,可以更好地理解控制原理圖。
(三)理解電路原理
控制原理圖是一種電路圖紙,因此理解電路原理是非常必要的。比如,了解電路中的電源、開關(guān)、電機、傳感器等元件的作用,以及它們之間的連接關(guān)系。
總結(jié)
通過本文的介紹,我們了解了碼垛機器人的控制原理圖和工作原理,以及如何理解這些圖紙。對于碼垛機器人的使用者來說,了解控制原理圖是非常必要的,可以更好地理解機器人的工作原理,從而更好地使用機器人。
公司地址:江蘇省蘇州太倉市高新區(qū)蘇州中路585號洋沙工業(yè)園四號廠房 研茂集團專業(yè)提供自動包裝流水線,裝盒機,大袋包裝機,堆垛機一站式供應(yīng)商!
江蘇研茂包裝自動化有限公司 版權(quán)所有 備案號:蘇ICP備17003554號-3  蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責(zé)條款 開箱機裝箱機博客
蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責(zé)條款 開箱機裝箱機博客