全國免費咨詢熱線
4008501759
免費咨詢熱線
18016000798作為一種高效的物流設備,碼垛機器人在現代物流行業中得到了廣泛的應用。它能夠自動完成貨物的碼垛、拆垛、轉垛等操作,大大提高了物流效率和準確性。但是,在使用碼垛機器人之前,我們需要了解它的結構和工作原理,這樣才能更好地使用它,提高工作效率。本文將為大家介紹碼垛機器人的結構說明,幫助大家更好地了解碼垛機器人。
一、碼垛機器人的結構
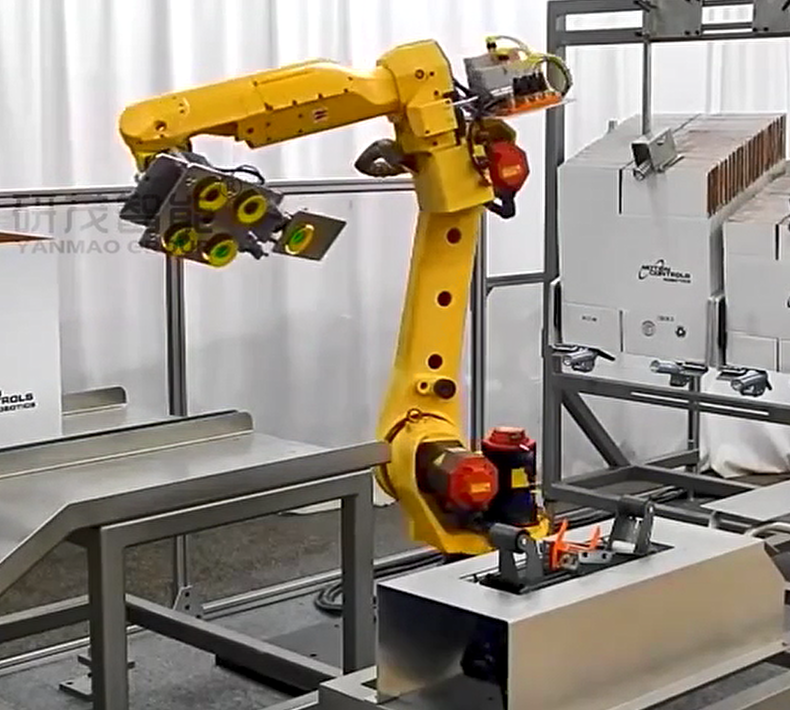
1. 機械臂部分
機械臂是碼垛機器人的核心部分,它負責完成貨物的碼垛、拆垛、轉垛等操作。機械臂通常由多個關節組成,每個關節都可以進行旋轉、伸縮等動作,從而實現機械臂的靈活運動。機械臂的末端通常配有夾爪或吸盤等裝置,用于抓取貨物。
2. 控制系統部分

控制系統是碼垛機器人的大腦,它負責控制機械臂的運動和操作。控制系統通常由計算機、控制器、傳感器等多個部分組成。計算機負責處理機器人的運動軌跡和操作指令,控制器負責將指令傳遞給機械臂,傳感器負責感知機器人和周圍環境的狀態,從而實現機器人的自動化控制。
3. 供電系統部分
供電系統是碼垛機器人的能量來源,它負責為機器人提供電力。供電系統通常由電池、電源、電機等多個部分組成。電池是機器人的主要能量儲存器,電源負責將外部電源轉化為機器人所需的電力,電機則負責驅動機械臂和其他部件的運動。
二、碼垛機器人的工作原理
碼垛機器人的工作原理主要分為以下幾個步驟:
1. 感知環境
碼垛機器人首先需要感知周圍環境和貨物的位置、形狀等信息,通常通過傳感器來實現。傳感器可以感知機器人和貨物的距離、方向、形狀等信息,從而為機器人的操作提供依據。
2. 規劃路徑
根據感知到的環境信息,碼垛機器人需要規劃出自己的運動軌跡和操作路徑。這通常由計算機來完成,計算機會根據預設的算法和規則來計算出最優的路徑。
3. 控制機械臂
一旦規劃好了路徑,碼垛機器人就需要控制機械臂的運動和操作。這通常由控制器來完成,控制器會將計算機計算出的指令傳遞給機械臂,從而實現機械臂的自動化控制。
4. 抓取貨物
當機械臂運動到貨物的位置時,它會使用夾爪或吸盤等裝置來抓取貨物。這需要機械臂具備足夠的精度和力量,以確保貨物能夠被準確地抓取。
5. 碼垛操作
一旦貨物被抓取,機械臂就可以將其碼垛到指定的位置。這需要機械臂具備足夠的靈活性和精度,以確保貨物能夠被準確地碼垛。
三、為什么碼垛機器人的結構說明是必要的?
了解碼垛機器人的結構和工作原理,可以幫助我們更好地使用它,提高工作效率。首先,了解機械臂的結構和工作原理可以幫助我們更好地掌握機械臂的運動規律和操作方法,從而更加靈活地使用機械臂。其次,了解控制系統的結構和工作原理可以幫助我們更好地理解機器人的自動化控制方式,從而更加精準地控制機器人的操作。最后,了解供電系統的結構和工作原理可以幫助我們更好地維護機器人的電力系統,從而保證機器人的正常工作。
總之,了解碼垛機器人的結構說明是非常必要的。它可以幫助我們更好地使用機器人,提高工作效率,同時也可以幫助我們更好地維護機器人,保證其正常工作。
公司地址:江蘇省蘇州太倉市高新區蘇州中路585號洋沙工業園四號廠房 研茂集團專業提供自動包裝流水線,裝盒機,大袋包裝機,堆垛機一站式供應商!
江蘇研茂包裝自動化有限公司 版權所有 備案號:蘇ICP備17003554號-3  蘇公網安備32058502010845 版權聲明 免責條款 開箱機裝箱機博客
蘇公網安備32058502010845 版權聲明 免責條款 開箱機裝箱機博客