您好,歡迎訪問江蘇研茂包裝自動(dòng)化有限公司!
- 網(wǎng)站地圖
- 聯(lián)系我們
- 關(guān)注微信
您好,歡迎訪問江蘇研茂包裝自動(dòng)化有限公司!

全國免費(fèi)咨詢熱線
4008501759
免費(fèi)咨詢熱線
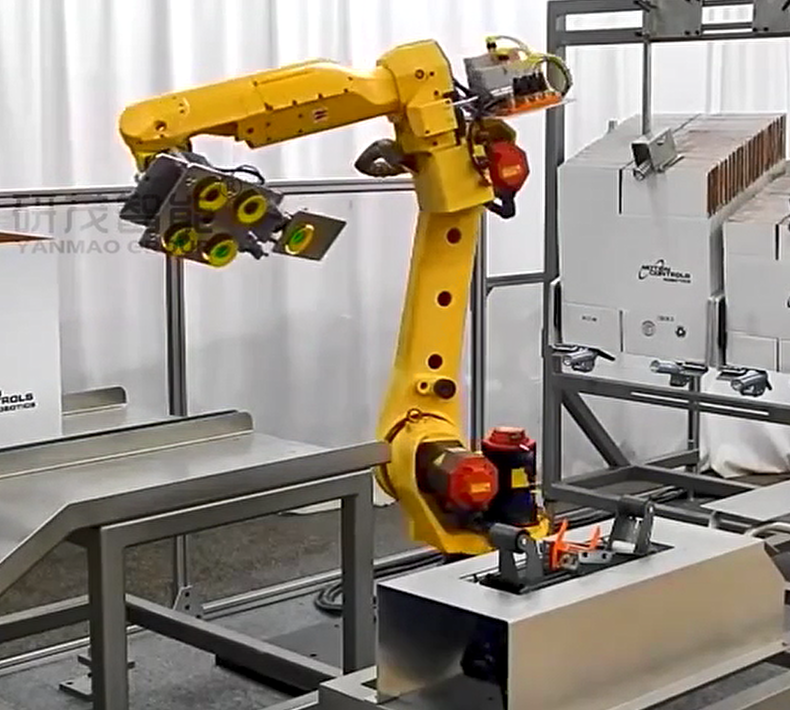
18016000798抓手碼垛機(jī)這種自動(dòng)化碼垛機(jī)如何實(shí)現(xiàn)自動(dòng)化的?
現(xiàn)如今,如果我們走入智能化、智能化系統(tǒng)較為高的生產(chǎn)制造公司,大家會(huì)發(fā)覺,生產(chǎn)車間里繁忙的并不是職工,只是自動(dòng)式智能化系統(tǒng)的機(jī)器設(shè)備在焦慮不安井然有序的工作中著。
實(shí)際上,不僅生產(chǎn)制造領(lǐng)域,如果我們走入物流行業(yè),也會(huì)發(fā)覺庫房里包裝、送貨、堆垛的,是著力點(diǎn)碼垛機(jī)這類自動(dòng)化技術(shù)碼垛機(jī),那么著力點(diǎn)碼垛機(jī)這類自動(dòng)化技術(shù)碼垛機(jī)是怎么完成自動(dòng)化技術(shù)的呢?
碼垛機(jī)器人控制系統(tǒng)的設(shè)計(jì)方案:碼垛機(jī)器人的控制系統(tǒng)關(guān)鍵包含手機(jī)軟件控制系統(tǒng)和硬件配置控制系統(tǒng),在當(dāng)代碼垛機(jī)器人控制系統(tǒng)設(shè)計(jì)中,硬件配置控制系統(tǒng)多采用模塊化設(shè)計(jì)的方式,且整體構(gòu)造采用了分布式系統(tǒng)系統(tǒng)結(jié)構(gòu)。 上位機(jī)軟件采用一般工業(yè)控制系統(tǒng)計(jì)算機(jī),關(guān)鍵解決系統(tǒng)軟件的監(jiān)管和作業(yè)控制,如示教盒操縱、表明服務(wù)項(xiàng)目、坐標(biāo)轉(zhuǎn)換、全自動(dòng)加降速計(jì)算等。
依據(jù)使用人的指令和姿勢程序流程句子的規(guī)定開展運(yùn)動(dòng)軌跡整體規(guī)劃、刀具半徑補(bǔ)償計(jì)算及坐標(biāo)變換,計(jì)算出各軸電動(dòng)機(jī)的部位,并接受依據(jù)下一級(jí)的意見反饋數(shù)據(jù)信號(hào)和外感應(yīng)器的數(shù)據(jù)信號(hào),分辨每日任務(wù)的實(shí)行狀況和自然環(huán)境情況,隨后往下一級(jí)各骨節(jié)部位伺服控制系統(tǒng)傳輸一次與設(shè)置點(diǎn)相對(duì)的部位升級(jí)值,完成對(duì)各關(guān)節(jié)運(yùn)動(dòng)的融洽和操縱功效。
下位機(jī)采用DSP控制板和PLC可編程邏輯控制板,DSP控制板即為所采用的PMAC104運(yùn)動(dòng)控制器,主要是實(shí)行即時(shí)動(dòng)力學(xué)計(jì)算、運(yùn)動(dòng)軌跡整體規(guī)劃、刀具半徑補(bǔ)償計(jì)算、伺服控制等,不斷載入各軸伺服電機(jī)的單脈沖量,計(jì)算智能機(jī)器人的現(xiàn)行標(biāo)準(zhǔn)部位,并且用手機(jī)軟件方式與給出部位開展較為,對(duì)誤差開展PID調(diào)整,而PLC關(guān)鍵解決智能機(jī)器人附近外部設(shè)備的操縱,如智能機(jī)器人爪子氣動(dòng)式玻璃吸盤,附近各種各樣皮帶輸送機(jī)的監(jiān)管等。
公司地址:江蘇省蘇州太倉市高新區(qū)蘇州中路585號(hào)洋沙工業(yè)園四號(hào)廠房 研茂集團(tuán)專業(yè)提供自動(dòng)包裝流水線,裝盒機(jī),大袋包裝機(jī),堆垛機(jī)一站式供應(yīng)商!
江蘇研茂包裝自動(dòng)化有限公司 版權(quán)所有 備案號(hào):蘇ICP備17003554號(hào)-3  蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責(zé)條款 開箱機(jī)裝箱機(jī)博客
蘇公網(wǎng)安備32058502010845 版權(quán)聲明 免責(zé)條款 開箱機(jī)裝箱機(jī)博客